Modul 4
1. Pendahuluan[Kembali]
Keamanan rumah dan properti merupakan aspek vital dalam kehidupan sehari-hari. Selain ancaman pencurian, risiko kebakaran dan kebocoran gas juga menjadi perhatian utama dalam menjaga keamanan rumah. Garasi, sebagai bagian dari rumah yang sering menyimpan barang berharga dan bahan mudah terbakar, memerlukan sistem keamanan yang lebih canggih untuk mengatasi ancaman tersebut. Banyak sistem keamanan garasi yang ada saat ini masih menggunakan metode manual atau konvensional yang kurang efektif dalam mendeteksi kebakaran atau kebocoran gas. Sistem manual ini juga mengharuskan pemilik rumah untuk selalu waspada dan melakukan pengawasan langsung, yang tentu tidak selalu memungkinkan. Ketika pemilik rumah sedang tidak berada di tempat, misalnya saat bekerja atau berlibur, garasi yang tidak dilengkapi dengan sistem deteksi kebakaran dan gas yang baik menjadi sangat rentan terhadap bahaya tersebut. Oleh karena itu, diperlukan inovasi dalam sistem keamanan garasi yang dapat memberikan perlindungan lebih optimal serta mampu bekerja secara otomatis. Berdasarkan hal tersebut, kami berencana membuat simulasi sistem keamanan garasi pintar yang fokus pada deteksi kebakaran dan kebocoran gas. Sistem ini dirancang untuk memantau dan mengamankan garasi secara real-time dengan menggunakan berbagai teknologi sensor dan mikrokontroler.
Sistem keamanan garasi pintar ini akan dilengkapi dengan sensor RFID untuk mengidentifikasi akses yang sah dan memastikan hanya pemilik atau orang yang berwenang yang dapat memasuki garasi, sensor ultrasonik untuk mendeteksi keberadaan objek atau pergerakan di dalam garasi sebagai bagian dari sistem pengawasan umum, sensor api (flame sensor) untuk mendeteksi adanya api atau sumber panas yang berlebihan yang dapat mengindikasikan kebakaran, sensor PIR (Passive Infrared) untuk mendeteksi gerakan manusia di dalam garasi yang dapat membantu dalam pemantauan aktivitas dan keamanan, serta sensor gas untuk mendeteksi kebocoran gas yang berpotensi berbahaya seperti gas alam atau propana. Dengan menggunakan mikrokontroler seperti Arduino, sistem ini dapat memproses data dari sensor-sensor tersebut dan secara otomatis melakukan tindakan yang diperlukan, seperti mengirimkan notifikasi kepada pemilik rumah atau mengaktifkan alarm. Selain itu, sistem ini juga dapat diintegrasikan dengan perangkat mobile sehingga pemilik rumah dapat memantau keamanan garasi mereka dari jarak jauh. Dengan adanya sistem keamanan garasi pintar ini, diharapkan keamanan terhadap risiko kebakaran dan kebocoran gas dapat meningkat dan memberikan rasa aman bagi pemilik rumah. Sistem ini juga diharapkan dapat menjadi solusi efektif dalam mencegah insiden kebakaran dan kebocoran gas di garasi, serta memudahkan pemilik rumah dalam mengelola keamanan rumah mereka secara lebih efisien.
2. Tujuan[Kembali]
1. Untuk mengetahui penggunaan mikroprosesor dan mikrokontroler pada prototype yang dibuat.
2. Untuk menghasilkan alat yang dapat beroperasi secara otomatis berbasis mikroprosesor dan mikrokontroler.
3. Alat dan Bahan[Kembali]
Alat
Breadboard

Kabel USB

Kabel Jumper

Bahan
Resistor

Baterai

Arduino Uno

Sensor Flame

Sensor MQ2

Sensor Ultrasonik


Sensor RFID

Motor Servo

Motor Driver


LCD I2C


Buzzer

4. Dasar Teori[Kembali]
1. PWM (Pulse Width Modulation)
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa
merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi. Duty Cycle adalah perbandingan antara waktu ON (lebar pulsa High) dengan perioda. Duty Cycle biasanya dinyatakan dalam bentuk persen (%).

- Duty Cycle = tON / ttotal
- tON = Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
- tOFF = Waktu OFF atau Waktu dimana tegangan keluaran berada pada posisi rendah (low atau 0)
- ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut juga dengan “periode satu gelombang”
Pada board Arduino Uno, pin yang bisa dimanfaatkan untuk PWM adalah pin yang diberi tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin tersebut merupakan pin yang bisa difungsikan untuk input analog atau output analog. Oleh sebab itu, jika akan menggunakan PWM pada pin ini, bisa dilakukan dengan perintah analogWrite();.
PWM pada arduino bekerja pada frekuensi 500Hz, artinya 500 siklus/ketukan dalam satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0 hingga 255. Ketika kita memberikan angka 0, berarti pada pin tersebut tidak akan pernah bernilai 5 volt (pin selalu bernilai 0 volt). Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan bernilai 5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita anggap setengah dari 0 hingga 255, atau 50% dari 255), maka setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 x 255 atau 64), maka 1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0 volt, dan ini akan terjadi 500 kali dalam 1 detik.

2. ADC (Analog Digital Converter)
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronika yang digunakan sebagai penghubung dalam pemrosesan sinyal analog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt. Pada Arduino, menggunakan pin analog input yang diawali dengan kode A (A0- A5 pada Arduino Uno). Fungsi untuk mengambil data sinyal input analog menggunakan analogRead(pin);.
3. Mikrokontroler
Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, serta tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang ke adaptor DC atau baterai untuk menjalankannya

Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :

4. Komunikasi
Universal Asynchronous Receiver Transmitter (UART)
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
Cara kerja komunikasi UART:
Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudian ditransfer secara parallel ke data bus penerima.
5. Sensor
5.1 Sensor Flame

Flame Sensor adalah komponen elektronika yang memiliki fungsi dapat mendeteksi nyala api dengan panjang gelombang 760nm – 1100nm. Sensor nyala api ini mempunyai sudut pembacaan 60 derajat, dan beroperasi pada suhu -25 derajat -85 derajat. Dan jarak pembacaan antara sensor dan objek yang dideteksi tidak boleh terlalu dekat, untuk menghindari kerusakan sensor.
Spesifikasi dari sensor flame :
- Tegangan operasi : 5V untuk analog, 3.3V untuk digital
- Pin keluaran digital dan analog
- Sensitifnya dapat disesuaikan
- Deteksi panjang gelombang IR : 760nm – 1100nm
- Ukuran : 30 x 15mm
- Berat : 3g



5.2 Sensor Gas MQ2

Sensor MQ-2 adalah sensor yang peka terhadap asap rokok. Bahan utamanya adalah SnO2, yang memiliki konduktivitas rendah di udara bersih. Ketika ada kebocoran gas, konduktivitas sensor meningkat; semakin tinggi konsentrasi gas, semakin tinggi pula konduktivitas sensor. Sensor MQ-2 peka terhadap berbagai gas seperti LPG, propana, hidrogen, karbon monoksida, metana, dan alkohol, serta gas-gas mudah terbakar lainnya di udara.
Sensor MQ-2 berfungsi untuk mendeteksi keberadaan asap dari gas mudah terbakar di udara. Sensor ini terdiri dari tabung aluminium yang dikelilingi silikon, dengan elektroda aurum di tengahnya yang memiliki elemen pemanas. Saat pemanasan terjadi, kumparan memanaskan SnO2 keramik sehingga menjadi semikonduktor yang melepaskan elektron. Ketika asap terdeteksi oleh sensor dan mencapai elektroda aurum, sensor MQ-2 menghasilkan tegangan analog sebagai output.
Spesifikasi dari sensor gas MQ-2 :
- Tegangan Operasional adalah +5V
- Dapat digunakan untuk Mengukur atau mendeteksi LPG, Alkohol, Propana, Hidrogen, CO dan bahkan metana
- Tegangan keluaran analog: 0V hingga 5V
- Tegangan Output Digital: 0V atau 5V (Logika TTL)
- Durasi pemanasan awal 20 detik
- Dapat digunakan sebagai sensor digital atau analog
- Sensitivitas pin Digital dapat divariasikan menggunakan potensiometer

Cara menggunakan Sensor MQ-2 untuk mengukur PPM
Pengkabelan dasar untuk sensor dari lembar data ditunjukkan di bawah ini
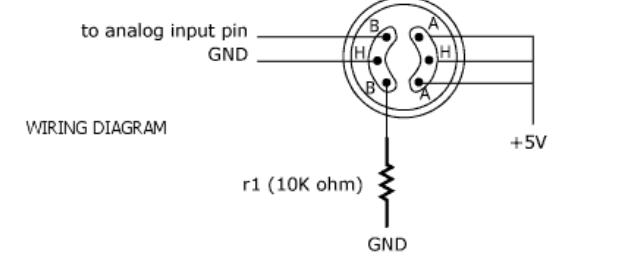
Prosedur pengukuran PPM menggunakan sensor MQ sama tetapi beberapa nilai konstanta
akan bervariasi berdasarkan jenis sensor MQ yang digunakan. Pada dasarnya, kita perlu melihat
grafik (Rs/Ro) VS PPM yang diberikan dalam lembar data (juga ditunjukkan di bawah).

Nilai Ro merupakan nilai hambatan pada udara segar dan nilai Rs merupakan nilai hambatan
pada konsentrasi Gas. Pertama, Anda harus mengkalibrasi sensor dengan mencari nilai Ro di udara
segar dan kemudian menggunakan nilai tersebut untuk mencari Rs menggunakan rumus
Setelah kita menghitung Rs dan Ro, kita dapat menemukan rasionya dan kemudian menggunakan
grafik di atas, kita dapat menghitung nilai ekuivalen PPM untuk gas tersebut.
Aplikasi:
- Mendeteksi atau mengukur Gas seperti LPG, Alkohol, Propana, Hidrogen, CO dan bahkan metana
- Pemantau kualitas udara
- Alarm kebocoran gas
- Pemeliharaan standar keselamatan
- Menjaga standar lingkungan di rumah sakit
5.3 Sensor PIR

Sensor PIR (Passive Infrared) merupakan sebuah sensor yang digunakan untuk mendeteksi pergerakan. Karena itu sensor PIR ini disebut sebagai sensor gerakan / motion sensor. Jadi sensor PIR ini digunakan untuk mendeteksi apakah ada pergerakan manusia di sekitar jangkauan dari sensor ini.
Spesifikasi dari sensor pir :
- Rentang tegangan input yang luas bervariasi dari 4.V hingga 12V (+5V disarankan)
- Tegangan keluaran Tinggi/Rendah (3.3V TTL)
- Dapat membedakan gerak benda dan gerak manusia
- Memiliki mode pengoperasian - Dapat Diulang (H) dan Tidak Dapat Diulang (H)
- Jarak tempuh sekitar 120° dan 7 meter
- Konsumsi daya rendah 65mA
- Suhu pengoperasian dari -20° hingga +80° Celcius

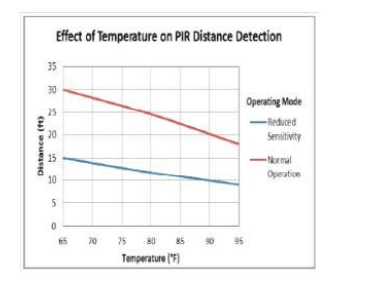
Grafik Respon Sensor PIR:
1. Respon terhadap arah, jarak, dan kecepatan

2. Grafik Respon terhadap Suhu
5.4 Sensor RFID

Radio Frequency Identification (RFID) merupakan teknologi yang berguna untuk
mengidentifikasi atau melakukan penelusuran jejak pada sebuah benda dengan memanfaatkan
gelombang elektromagnetik. RFID berbentuk chip yang dimasukkan dalam sebuah benda mati
ataupun hidup.
Spesifikasi dari sensor RFID:
- Fungsi Dasar: Membaca dan mengidentifikasi kartu RFID
- Tegangan Operasi: 5V.
- Keluaran: Output SPI (Serial Peripheral Interface)
- Sensitivitas dan Durasi Baca: Dapat disesuaikan untuk kebutuhan aplikasi tertentu.
- Jarak Baca: Bergantung pada kondisi lingkungan dan jenis kartu RFID, namun umumnya dapat mencapai beberapa sentimeter hingga beberapa puluh sentimeter
- Waktu Inisialisasi: Tergantung pada sistem yang digunakan, biasanya butuh waktu kurang dari satu detik untuk inisialisasi
- Ukuran dan Berat: Ukuran dan berat yang mungkin bervariasi tergantung pada model atau produsen, namun umumnya cukup kecil dan ringan untuk integrasi dalam berbagai aplikasi.
Pinout dari sensor RFID:


Grafik Respon sensor RFID:

5.5 Sensor Ultrasonik

Sensor ultrasonik merupakan sensor yang menggunakan gelombang ultrasonik. Gelombang
ultrasonik yaitu gelombang yang umum digunakan untuk mendeteksi keberadaan suatu benda dengan
memperkirakan jarak antara sensor dan benda tersebut. Sensor ini berfungsi untuk mengubah besaran
fisis (bunyi) menjadi besaran listrik begitu pula sebaliknya. Gelombang ultrasonik memiliki frekuensi
sebesar 20.000 Hz. Bunyi tersebut tidak dapat didengar oleh telinga manusia. Bunyi tersebut dapat
didengar oleh hewan tertentu seperti anjing, kelelawar dan kucing. Bunyi gelombang ultrasonik dapat
merambat melalui zat cair, padat dan gas. Benda cair merupakan media merambat yang paling baik
untuk sensor ultrasonik jika dibandingkan dengan benda padat dan gas. Oleh karena itu, sensor
ultrasonik banyak digunakan pada kapal selam dan alat khusus untuk mengukur kedalaman air laut.
Spesifikasi dari sensor ultrasonik:
• Jangkauan deteksi: 2cm hingga 400cm
• Tegangan kerja: 5V DC
• Konsumsi daya: kurang dari 15mA
• Frekuensi gelombang ultrasonik: 40kHz
• Resolusi: 0.3cm
• Akurasi: 0.5-2cm
Pinout dari sensor ultrasonik:


Berdasarkan grafik di atas dapat disimpulkan bahwa bahwa sensor ultrasonik memiliki kinerja rendah dalam pengukuranpada jarak yang rendah. Kinerja sensor memiliki hasil yang akurat untuk pengukuran jarak jauh. Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut: Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz. Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut. Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus:
S = 340.t/2
Keterangan:
• S = jarak antara sensor ultrasonik dengan benda (bidang pantul)
• t = selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang
pantul diterima receiver
6. LCD

Pengertian LCD (Liquid Crystal Display), LCD (Liquid Crystal Display) adalah jenis
tampilan layar yang menggunakan senyawa cair yang memiliki struktur molekul polar,
ditempatkan di antara dua elektroda transparan. Ketika medan listrik diberikan, molekul-molekul
tersebut akan menyesuaikan posisinya pada medan dan membentuk susunan kristalin yang
mempolarisasi cahaya yang melaluinya.
Citra dihasilkan dengan menggabungkan kondisi nyala dan mati dari piksel-piksel yang
membentuk layar LCD. Umumnya, LCD yang dijual di pasaran telah dilengkapi dengan sirkuit
terintegrasi sehingga pengguna dapat dengan mudah mengontrol tampilan LCD menggunakan
mikrokontroler dan mengirimkan data melalui pin input yang telah tersedia.
Spesifikasi LCD :
- Format tampilan : 16 x 2 karakter
- Pengontrol bawaan : ST 7066 (atau setara)
- Siklus kerja : 1/16 • 5 x 8 titik termasuk kursor
- Supply + 5 V (juga tersedia untuk + 3 V)
- LED dapat digerakkan oleh pin 1, pin 2, pin 15, pin 16 atau A dan K
- N.V. opsional untuk supply + 3 V

I2C adalah protokol komunikasi serial yang dikembangkan oleh Philips (sekarang NXP
Semiconductors) pada tahun 1982. Protokol ini memungkinkan beberapa perangkat terhubung
melalui jalur komunikasi yang sama, menggunakan hanya dua kabel, yaitu SDA (Serial Data) dan
SCL (Serial Clock). Kedua kabel ini mengizinkan transfer data antar-perangkat secara sinkron.
Spesifikasi Pin pada I2C:
- GND : terhubung dengan GND Arduino
- VCC : terhubung dengan 5V
- SDA : terhubung dengan pin SDA (A4)
- SCL : terhubung dengan pin SCL (A5)

Buzzer adalah sebuah komponen elektronika yang dapat menghasilkan getaran suara
berupa gelombang bunyi. Buzzer akan menghasilkan getaran suara ketika diberikan sejumlah
tegangan listrik dengan taraf tertentu sesuai dengan spesifikasi bentuk dan ukuran buzzer itu
sendiri. Pada umumnya, buzzer ini sering digunakan sebagai alarm karena penggunaannya yang
cukup mudah yaitu dengan memberikan tegangan input maka buzzer akan menghasilkan getaran
suara berupa gelombang bunyi yang dapat didengar.
Spesifikasi :
• Nilai tegangan : 6V DC
• Tegangan pengoperasian : 4 hingga 8V DC
• Arus : ≤30mA
• Keluaran suara pada 10cm : ≥85dB
• Frekuensi resonansi : 2300 ±300Hz
• Nada : Berkelanjutan
• Suhu operasional : -25°C hingga +80°C
• Suhu penyimpanan : -30°C hingga +85°C
• Berat : 2g
9. Baterai
Baterai merupakan alat listrik-kimiawi yang menyimpan energi serta mengeluarkan
tenaganya dalam bentuk listrik. Baterai ialah perangkat yang mampu menghasilkan tegangan
DC, yaitu dengan cara mengubah energi kimia yang terkandung di dalamnya menjadi energi
listrik melalui suatu reaksi elektrokimia, Redoks (Reduksi – Oksidasi). Baterai yang biasa dijual
(disposable/sekali pakai) ini mempunyai tegangan listrik 1,5 volt. Baterai ada yang berbentuk
tabung ataupun kotak.
Spesifikasi :
• Kapasitas nominal : 2200mAh (0.2Ca, debit)
• Kapasitas minimum : 2100mAh (0.2Ca, debit)
• Tegangan nominal : 3.7V
• Metode pengisian : CC – CV (tegangan konstan dengan arus terbatas)
• Pengisian arus : a. Biaya standar : 1300mA
b. Pengisian cepat : 2600mA
• Waktu pengisian daya : a. Biaya standar : 3jam
b. Pengisian cepat : 2.5jam
• Maks. mengisi arus : 2600mA
• Maks. debit saat ini : 5200mA
• Tegangan cut-off discharge : 2.75V
• Berat sel : maks. 47.0g
• Dimensi sel : a. Diameter (maks.) : 18.40mm
b. Tinggi (maks.) : 65.00mm
10. Motor Servo

Motor servo adalah bagian dari salah satu motor listrik yang paling sering digunakan.
Motor servo merupakan sebuah perangkat berbentuk motor atau penggerak yang menggunakan
sistem kontrol umpan balik loop tertutup atau servo. Gerakan dan posisi akhir poros motor servo
dikontrol dengan sistem kontrol loop tertutup. Maksudnya adalah motor servo dapat diatur sesuai
kebutuhan dengan memastikan letak sudut dari poros output motor. Sensor yang ada di dalam
motor servo akan mendeteksi posisi poros output yang tepat sehingga sinyal kendali yang dikirim
oleh kontrol input akan menjaga poros tetap pada posisi yang diinginkan.
Berdasarkan jenis supply arus listriknya Motor servo terdiri dari dua jenis yaitu motor servo AC dan
motor servo DC.
1. Motor servo DC diaplikasikan ke mesin yang ringan seperti mainan elektronik, printer dan
beberapa perangkat elektronik rumah.
2. Motor servo AC sering digunakan untuk mesin-mesin di industri karena spesifikasinya yang
bisa menerima arus tinggi maupun beban berat.
Pada project kali ini kami menggunakan jenis Motor Servo DC SG90s.
Adapun sspesifikasi nya
sebagai berikut:
• Voltase beroperasi +5V
• Torsi 2.5kg/cm
• Kecepatan beroperasi 0.1s/60°
• Bahan gear dari plastic
• Rotasi 0°-180°
• Berat motor 9gm
11. Motor DC

Motor DC adalah perangkat elektris yang mengkonversi energi listrik menjadi energi mekanik. Dalam industri, motor DC telah digunakan untuk menggerakan berbagai macam perangkat khususnya perangkat industri yang memerlukan torsi tinggi dan stabil.
Spesifikasi:
• Ukuran = 20 x 15 x 25 mm
• Panjang batang as = 8mm
• Diamater batang as = 2mm
• Tegangan kerja = 1-6 V DC
• Daya = 0.35 - 0.40 A
12. Motor Driver

Spesifikasi :
• Tegangan Input : 3.2V - 40V
• Driver : Driver Motor L298N Dual H Bridge DC
• Supply : 5V
• Arus puncak : 2A
• Kisaran operasi : 0 - 36 mA
• Konsumsi daya maksimum : 20W (ketika suhu 75 ℃)
• Suhu penyimpanan : -25 ℃ ~ +130 ℃
• Keluaran pin 10 (sumber tegangan IC) jika berfungsi sebagai pin output : 5V
• Ukuran : 3.4cm x 4.3cm x 2.7cm
13. Resistor

Resistor merupakan komponen elektronika dasar yang digunakan untuk membatasi jumlah
arus yang mengalir dalam satu rangkaian.Sesuai dengan namanya, resistor bersifat resistif dan
umumnya terbuat dari bahan karbon. Resistor mempunyai nilai resistansi (tahanan) tertentu yang
dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi
tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan Hukum OHM :

Dimana V adalah tegangan, I adalah kuat arus, dan R adalah Hambatan.
Di dalam resistor, terdapat ketentuan untuk membaca nilai resistor yang diwakili dengan kode warna
dengan ketentuan di bawah ini :


Sebagian besar resistor yang kita lihat memiliki empat pita berwarna . Oleh karena itu ada cara membacanya seperti ketentuan dibawah ini :
1. Dua pita pertama dan kedua menentukan nilai dari resistansi
2. Pita ketiga menentukan faktor pengali, yang akan memberikan nilai resistansi.
3. Dan terakhir, pita keempat menentukan nilai toleransi.
Rumus Resistor:
Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
Paralel:
1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
14. LED

Light Emitting Diode atau sering disingkat dengan LED adalah komponen elektronika yang
dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju. LED merupakan
keluarga Dioda yang terbuat dari bahan semikonduktor. Warna-warna Cahaya yang dipancarkan
oleh LED tergantung pada jenis bahan semikonduktor yang dipergunakannya. LED juga dapat
memancarkan sinar inframerah yang tidak tampak oleh mata seperti yang sering kita jumpai pada
Remote Control TV ataupun Remote Control perangkat elektronik lainnya.
Spesifikasi tegangan dari warna :

5. Percobaan [Kembali]
a. Prosedur[Kembali]
- Download library yang diperlukan pada bagian download dalam blog.
- Buka proteus yang sudah diinstal untuk membuat rangkaian.
- Tambahkan komponen seperti Arduino, sensor, dan perangkat lainnya lalu susun menjadi rangkaian.
- Buka Arduino IDE yang sudah diinstal.
- Di Arduino IDE, pergi ke menu "File" > "Preferences".Pastikan opsi
- "Show verbose during compile" dicentang untuk mendapatkan informasi detail saat kompilasi.
- Salin kode program Arduino pada blog kemudian tempelkan program tadi ke Arduino IDE.
- Kompilasikan kode dengan menekan tombol "Verify" di Arduino IDE.
- Cari dan salin path file HEX yang dihasilkan selama proses kompilasi.
- Kembali ke Proteus dan pilih Arduino yang telah Anda tambahkan di rangkaian.
- Buka opsi "Program File" dan tempelkan path HEX yang telah Anda salin dari Arduino IDE.
- Jalankan simulasi di Proteus.
- Download library yang diperlukan pada bagian download dalam blog.
- Buka proteus yang sudah diinstal untuk membuat rangkaian.
- Tambahkan komponen seperti Arduino, sensor, dan perangkat lainnya lalu susun menjadi rangkaian.
- Buka Arduino IDE yang sudah diinstal.
- Di Arduino IDE, pergi ke menu "File" > "Preferences".Pastikan opsi
- "Show verbose during compile" dicentang untuk mendapatkan informasi detail saat kompilasi.
- Salin kode program Arduino pada blog kemudian tempelkan program tadi ke Arduino IDE.
- Kompilasikan kode dengan menekan tombol "Verify" di Arduino IDE.
- Cari dan salin path file HEX yang dihasilkan selama proses kompilasi.
- Kembali ke Proteus dan pilih Arduino yang telah Anda tambahkan di rangkaian.
- Buka opsi "Program File" dan tempelkan path HEX yang telah Anda salin dari Arduino IDE.
- Jalankan simulasi di Proteus.
b. Hardware[Kembali]




c. Rangkaian Simulasi dan Prinsip Kerja[Kembali]

Prinsip Kerja Rangkaian:
Pada rangkaian ini, digunakan lima jenis sensor (Sensor Flame, Sensor Gas MQ2, Sensor PIR,
Sensor RFID, dan Sensor Ultrasonik), dua Arduino (satu sebagai master dan satu sebagai slave), LCD
I2C 2x16, buzzer, baterai, motor driver, motor servo, motor DC, resistor, dan LED. Komunikasi
antara Arduino menggunakan UART, di mana pin Tx dari master terhubung ke pin Rx dari slave, dan
pin Rx dari master terhubung ke pin Tx dari slave.
Sensor-sensor yang digunakan meliputi Sensor Flame, Sensor Gas MQ2, Sensor PIR, Sensor
RFID, dan Sensor Ultrasonik.Sistem keamanan garasi pintar ini menggunakan berbagai sensor untuk
mendeteksi berbagai ancaman dan kondisi di dalam garasi. Sensor ultrasonik ditempatkan dekat pintu
depan garasi dan akan berlogika 1 saat mendeteksi adanya pergerakan mobil dari luar pada jarak
kurang dari 10 cm dari pintu garasi. Jika jaraknya lebih dari 10 cm, sensor ini akan berlogika 0.
Ketika sensor ini berlogika 1, motor servo akan hidup untuk membuka pintu garasi, sementara pada
layar LCD akan ditampilkan jarak mobil dari pintu garasi.
Sensor RFID digunakan untuk mendeteksi sentuhan atau kartu RFID yang ditempelkan.
Ketika kartu RFID terdeteksi, output dari sensor ini adalah mengaktifkan motor servo untuk
membuka pintu garasi dari dalam rumah, memberikan akses hanya kepada pemilik kartu RFID yang
sah. Sensor PIR ditempatkan dekat pintu dalam garasi dan akan berlogika 1 saat mendeteksi adanya
orang di dalam garasi. Outputnya adalah menyalakan LED kuning, yang berfungsi sebagai
perumpamaan lampu menyala untuk menunjukkan adanya aktivitas di dalam garasi.
Sensor gas akan berlogika 1 ketika mendeteksi adanya gas berbahaya. Sensor ini ditempatkan
di dinding garasi. Output dari sensor ini adalah menampilkan kondisi pada layar LCD, baik itu
kondisi aman atau ada gas. Sensor flame ditempatkan di dinding garasi dan akan berlogika 1 saat
mendeteksi adanya api. Ketika kondisi ini terdeteksi, outputnya adalah tampilan ada api pada lcd dan
lampu led merah menyala.
Selain itu, jika sensor gas dan sensor flame mendeteksi ancaman secara bersamaan,
buzzer dan LED merah akan menyala dan berkedip sebagai indikasi adanya kondisi darurat di garasi,.
Kemudian kran air pada langit-langit garasi akan hidup untuk memadamkan kebakaran yang terjadi
di dalam garasi.
Prinsip Kerja Rangkaian:
d. Flowchart[Kembali]
MASTER 


Program master
#include <LiquidCrystal_I2C.h>#include <SPI.h>#include <MFRC522.h> #define SS_PIN 10#define RST_PIN 9#define triggerPin 7#define echoPin 6#define flamePin 8#define gasPin 2#define pirPin 5
LiquidCrystal_I2C lcd(0x27, 16, 2);MFRC522 mfrc522(SS_PIN, RST_PIN);
long duration;int jarak;int flameStatus = 0;
void setup()
{ Serial.begin(9600); lcd.init(); lcd.backlight(); SPI.begin(); mfrc522.PCD_Init(); pinMode(triggerPin, OUTPUT); pinMode(echoPin, INPUT); pinMode(flamePin,INPUT); pinMode(gasPin, INPUT); pinMode(pirPin, INPUT);}
void loop() { //Flame Sensor int flameStatus = digitalRead(flamePin); //aktif low
//Sensor Gas MQ int gasStatus = digitalRead(gasPin); //aktif low
//Sensor PIR int pirStatus = digitalRead(pirPin);
//Ultrasonik digitalWrite(triggerPin, LOW); delayMicroseconds(2); digitalWrite(triggerPin, HIGH); delayMicroseconds(10); digitalWrite(triggerPin, LOW); duration = pulseIn(echoPin, HIGH); jarak = duration * 0.034 / 2;
lcd.clear(); lcd.setCursor(0,0); lcd.print("Jarak : "); lcd.print(jarak);
//Ultrasonic Condition if (jarak < 20) { Serial.write('A'); }
//Kondisi gas dan flame if (gasStatus == LOW && flameStatus == LOW){ Serial.write('B'); //buzzer dan led kedapkedip lcd.setCursor(0,1); lcd.print("Kebakaran,bahaya"); } else{ if(gasStatus == LOW){ Serial.write('C'); //led konstan lcd.setCursor(0,1); lcd.print("Ada Gas"); } else{ Serial.write('D'); }
if(flameStatus == LOW){ Serial.write('E'); //buzzer lcd.setCursor(0,1); lcd.print("Ada Api"); } else{ Serial.write('F'); }
}
//PIR Condition if (pirStatus == HIGH) { Serial.write('G'); } else { Serial.write('H'); }
delay(1000);
//RFID // Look for new cards if ( ! mfrc522.PICC_IsNewCardPresent()) { return; } // Select one of the cards if ( ! mfrc522.PICC_ReadCardSerial()) { return; } String content= ""; byte letter; for (byte i = 0; i < mfrc522.uid.size; i++) { content.concat(String(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ")); content.concat(String(mfrc522.uid.uidByte[i], HEX)); } content.toUpperCase();
//RFID Condition if (content.substring(1) == "93 4E 3A FE") { Serial.write('Y'); } else { Serial.write('Z'); } }
SLAVE 
Slave#include <Servo.h>
const int buzzer = 4;const int ledPir = 6;const int ledGas = 7;const int motorair = 2; Servo motorPintugarasi;
void setup() { Serial.begin(9600); pinMode(buzzer, OUTPUT); pinMode(ledPir, OUTPUT); pinMode(ledGas, OUTPUT); pinMode(motorair, OUTPUT); motorPintugarasi.attach(10); }
void loop() { if (Serial.available()){ char input = Serial.read(); Serial.println(input); switch(input) { case 'A': motorPintugarasi.write(135); break; case 'B': digitalWrite(buzzer, HIGH); digitalWrite(motorair,HIGH); digitalWrite(ledGas,HIGH); delay(1000); digitalWrite(ledGas,LOW); break; case 'C': digitalWrite(ledGas,HIGH); break; case 'D': digitalWrite(ledGas,LOW); break; case 'E': digitalWrite(buzzer, HIGH); break; case 'F': digitalWrite(buzzer, LOW); digitalWrite(motorair,LOW); break; case 'G': digitalWrite(ledPir,HIGH); break; case 'H': digitalWrite(ledPir, LOW); break; case 'Y': motorPintugarasi.write(135); break; case 'Z': motorPintugarasi.write(0); break; } }}


Program master
#include <LiquidCrystal_I2C.h>
#include <SPI.h>
#include <MFRC522.h>
#define SS_PIN 10
#define RST_PIN 9
#define triggerPin 7
#define echoPin 6
#define flamePin 8
#define gasPin 2
#define pirPin 5
LiquidCrystal_I2C lcd(0x27, 16, 2);
MFRC522 mfrc522(SS_PIN, RST_PIN);
long duration;
int jarak;
int flameStatus = 0;
void setup()
{
Serial.begin(9600);
lcd.init();
lcd.backlight();
SPI.begin();
mfrc522.PCD_Init();
pinMode(triggerPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(flamePin,INPUT);
pinMode(gasPin, INPUT);
pinMode(pirPin, INPUT);
}
void loop()
{
//Flame Sensor
int flameStatus = digitalRead(flamePin); //aktif low
//Sensor Gas MQ
int gasStatus = digitalRead(gasPin); //aktif low
//Sensor PIR
int pirStatus = digitalRead(pirPin);
//Ultrasonik
digitalWrite(triggerPin, LOW);
delayMicroseconds(2);
digitalWrite(triggerPin, HIGH);
delayMicroseconds(10);
digitalWrite(triggerPin, LOW);
duration = pulseIn(echoPin, HIGH);
jarak = duration * 0.034 / 2;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Jarak : ");
lcd.print(jarak);
//Ultrasonic Condition
if (jarak < 20)
{
Serial.write('A');
}
//Kondisi gas dan flame
if (gasStatus == LOW && flameStatus == LOW){
Serial.write('B'); //buzzer dan led kedapkedip
lcd.setCursor(0,1);
lcd.print("Kebakaran,bahaya");
}
else{
if(gasStatus == LOW){
Serial.write('C'); //led konstan
lcd.setCursor(0,1);
lcd.print("Ada Gas");
}
else{
Serial.write('D');
}
if(flameStatus == LOW){
Serial.write('E'); //buzzer
lcd.setCursor(0,1);
lcd.print("Ada Api");
}
else{
Serial.write('F');
}
}
//PIR Condition
if (pirStatus == HIGH)
{
Serial.write('G');
}
else {
Serial.write('H');
}
delay(1000);
//RFID
// Look for new cards
if ( ! mfrc522.PICC_IsNewCardPresent())
{
return;
}
// Select one of the cards
if ( ! mfrc522.PICC_ReadCardSerial())
{
return;
}
String content= "";
byte letter;
for (byte i = 0; i < mfrc522.uid.size; i++)
{
content.concat(String(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " "));
content.concat(String(mfrc522.uid.uidByte[i], HEX));
}
content.toUpperCase();
//RFID Condition
if (content.substring(1) == "93 4E 3A FE")
{
Serial.write('Y');
}
else {
Serial.write('Z');
}
}
Slave
#include <Servo.h>
const int buzzer = 4;
const int ledPir = 6;
const int ledGas = 7;
const int motorair = 2;
Servo motorPintugarasi;
void setup() {
Serial.begin(9600);
pinMode(buzzer, OUTPUT);
pinMode(ledPir, OUTPUT);
pinMode(ledGas, OUTPUT);
pinMode(motorair, OUTPUT);
motorPintugarasi.attach(10);
}
void loop() {
if (Serial.available()){
char input = Serial.read();
Serial.println(input);
switch(input) {
case 'A':
motorPintugarasi.write(135);
break;
case 'B':
digitalWrite(buzzer, HIGH);
digitalWrite(motorair,HIGH);
digitalWrite(ledGas,HIGH);
delay(1000);
digitalWrite(ledGas,LOW);
break;
case 'C':
digitalWrite(ledGas,HIGH);
break;
case 'D':
digitalWrite(ledGas,LOW);
break;
case 'E':
digitalWrite(buzzer, HIGH);
break;
case 'F':
digitalWrite(buzzer, LOW);
digitalWrite(motorair,LOW);
break;
case 'G':
digitalWrite(ledPir,HIGH);
break;
case 'H':
digitalWrite(ledPir, LOW);
break;
case 'Y':
motorPintugarasi.write(135);
break;
case 'Z':
motorPintugarasi.write(0);
break;
}
}
}
e. Video Demo[Kembali]
VIDEO SIMULASI
VIDEO SIMULASI
f. Download File[Kembali] Download HTML [Download Disini]Download Rangkaian [Download Disini]Download Video [Download DIsini]Download Listing Program [Download Disini]Download Library Sensor Flame [Download Disini]Download Library Sensor Gas MQ2 [Download Disini]Download Library Sensor PIR [Download Disini]Download Library Sensor Ultrasonik [Download Disini]Download Datasheet Sensor Flame [Download Disini]Download Datasheet Sensor Gas MQ2 [Download Disini]Download Datasheet Sensor PIR [Download Disini]Download Datasheet Sensor RFID [Download Disini]Download Datasheet Sensor Ultrasonik [Download Disini]Download Datasheet Motor DC [Download Disini]Download Datasheet Motor Servo [Download Disini]Download Datasheet LCD [Download Disini]Download Datasheet Arduino [Download Disini]
Download HTML [Download Disini]
Download Rangkaian [Download Disini]
Download Video [Download DIsini]
Download Listing Program [Download Disini]
Download Library Sensor Flame [Download Disini]
Download Library Sensor Gas MQ2 [Download Disini]
Download Library Sensor PIR [Download Disini]
Download Library Sensor Ultrasonik [Download Disini]
Download Datasheet Sensor Flame [Download Disini]
Download Datasheet Sensor Gas MQ2 [Download Disini]
Download Datasheet Sensor PIR [Download Disini]
Download Datasheet Sensor RFID [Download Disini]
Download Datasheet Sensor Ultrasonik [Download Disini]
Download Datasheet Motor DC [Download Disini]
Download Datasheet Motor Servo [Download Disini]
Download Datasheet LCD [Download Disini]
Download Datasheet Arduino [Download Disini]